"Epic" Advanced Dual Arm Robot:
"Epic" Advanced Dual Arm Robot:CAD software used: Autodesk Inventor 2018.
Download Scope: 3D CAD model (Autodesk Inventor files), STEP. Price: 20$
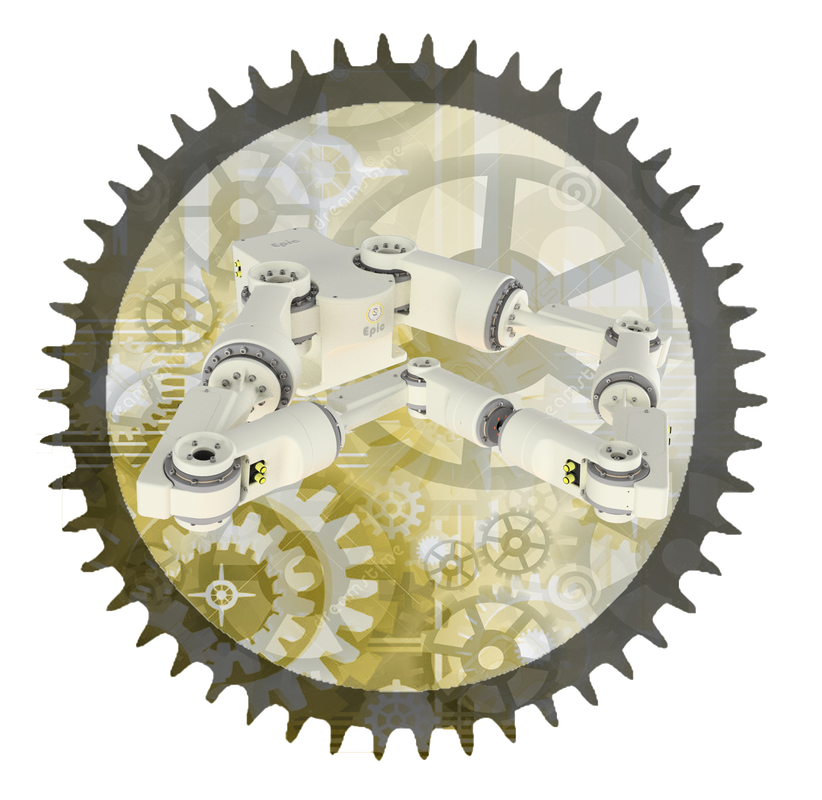
“Epic” is an advanced model of a complex mechanical design dual arm robot, it consists of two kinematic open chains, and each chain has six degrees of freedom (DOF) all of them are revolute (2×RRRRRR) and assembled in a way that each revolute joint’ axis is perpendicular with the previous revolute joint’s axis so that the actuator head of each arm is able to reach any point within the effective workspace of the robot at any desired angle. Each arm consists of six links, earth link (robot’s body) is included, numbered from 0 to 5.
Regarding the mechanical aspect, “Epic” robot has a complex design and depends in achieving its movement on groups of no-backlash mechanical actuators driven electrically and located in the center of six rotational joint of each arm; in the revolute joints with number 0, 2, 4 of each arm, each actuator group consists of (worm+ worm gear) group, slewing ring guide bearings, support bearings, connecting components, and couplings, all of these elements don’t need lubricating and are driven by means of high performance stepper motors equipped with encoders in order to read the angular output of the joints. In each arm, there are three sizes for the revolute joints (small, medium, and large) according to the parameters of the worm group in each joint; in the small sized joint, the transportation ratio is equal to 1:38 and the central distance is 34mm, in the medium sized joint, the transportation ratio is equal to 1:47 and the central distance is 45mm, and in the large sized joint, the transportation ratio is equal to 1:45 and the central distance is 70mm. The large sized joint is used in the revolute joint number 0, the medium sized joint is used in the revolute joint number 2, and the small sized joint is used in the revolute joint number 4, the maximum rotation angle for these joints in each arm is 150 degrees. Whereas in the revolute joints number 1, 3, and 5, the actuator groups consist of slewing ring guide bearings, mechanical connecting components, and coupling groups connected to electrical driving system, high performance stepper motors, and the angle for rotation in these joints is 360 degrees. In this robot, there are three sizes of stepper motors; they are NEMA 17, NEMA 23, and NEMA 23XL according to the National Electrical Manufacturer Association – NEMA, these motors run at nominal voltage equal to 24 or 48 volts with maximum voltage of 60 volts and rotate 1.8 degrees per each pulse, the holding torque for each size of these motors is 0.5 N.m, 2 N.m, and 3.5 N.m, respectively. The NEMA 23XL stepper motor is used for rotating the revolute joint number 0 in each arm, the NEMA 23 stepper motor is used to rotate the joint number 1 in each arm, and the NEMA 17 stepper motor is used for rotating the rest joints number 2, 3, 4, 5 in each arm. In case the robot is used in a manner so that its two end effectors are a single common point or subject (thus this point or subject is considered as a link connects the two end effectors each other), it worth the attention that the robot can be dealt with as a robot with closed kinematic chain similar to 12-linkage spatial mechanism’s kinematic chain. The application fields of “Epic” robot vary depending on the nature of its two end effectors; it can be used in simple manipulating processes, pick and place for instance, or in checking and inspecting procedures, and in the complex processes like surgical operation and the advanced manufacturing and assembling processes as well. |
|
|
|
|