SPYDRO Robot:
SPYDRO Robot:
|
CAD software used: Autodesk Inventor 2018.
Download Scope: 3D CAD model (Autodesk Inventor files), STEP. Price: 10$
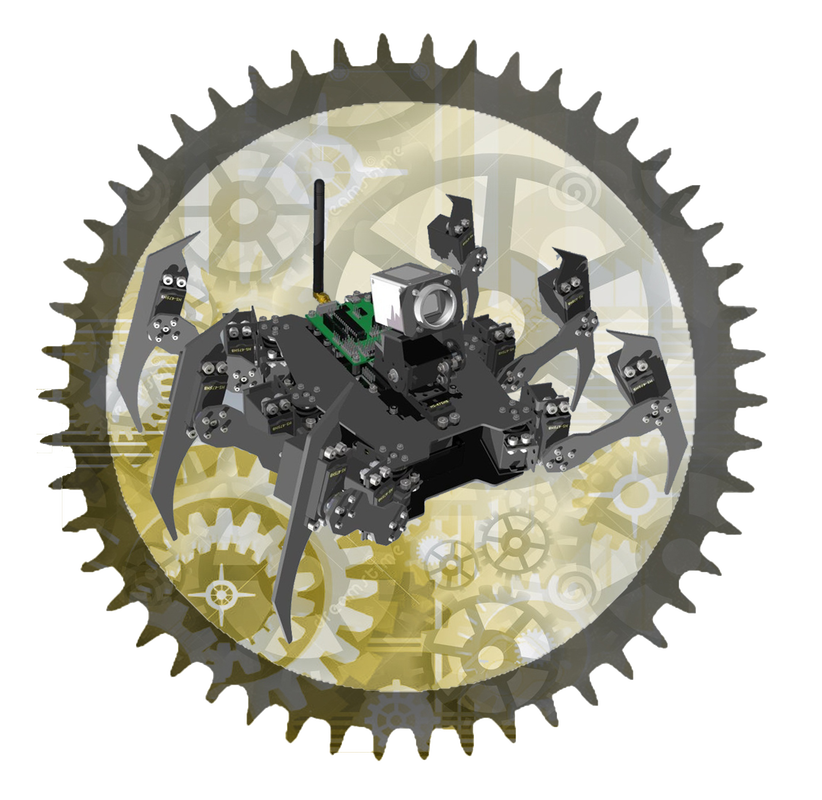
This robot has six legs, and regarding the mechanical design field, it is a simple robot. In order to obtain the ability to move, it depends on a number of motors that are connected directly to the motion axes according to each arm. Each arm has three degrees of freedom (3 DOF), and all of these degrees act as a rotational motion. Therefore, the robot has full flexibility to move and rotate in all directions.
Twenty small Servo motors have been used. They do not rotate a complete circle, but they rotate only (200) degrees. Three Servo motors have been installed for each arm of the spider robot (for each degree of freedom, we need one motor). The robot is provided with a high-quality industrial camera (656×494 pixels), and the camera itself is provided with two rotational degrees of freedom by assembling it to a special base which has two Servo motors to give it the ability to rotate in two perpendicular directions. All Servo motors can rotate up to (60) degrees within (0.18) seconds as a maximum when they are run by (6) volts. They rotate to the same angle within (0.23) seconds as a minimum when they are run by (4.8) volts. The torque of each motor according to the previous voltages is (5.5 – 4.4) Kg.cm. The Servo motors are connected to a microcontroller system consisting of a Servo motors controller from the type of (SSC-32) according to Lynxmotion company. This controller can drive (32) Servo motors at the same time, and (20) ports have been used from them. This controlling circuit is connected to an Arduino controller from the type of (RB-Lyn-363) according to the past company under the name "BotBoarduino." It is usually used for robot controlling and programming. A "Lipo" kind battery is used with a capacity of (5000) mAh connected to a voltage regulator and saver. The robot can be wirelessly controlled by using a Bluetooth circuit provided with an external antenna to improve the signal strength. The sensing range is (110) meters in an open area. The application fields that this robot can be useful in are the fields of dangerous nature and space science. It may be suitable for surveillance jobs, search and rescue jobs to find victims in areas that cannot be reached by humans. It can also be used in military fields as a method of spying and other special operations. |
|
|
|
|