Conventional robots and machines are made of rigid materials that limit their ability to elastically deform and adapt their shape to external constraints and obstacles. Although they have the potential to be incredibly powerful and precise, these rigid robots tend to be highly specialized and rarely exhibit the rich multifunctionality of natural organisms.
However, as the field of robotics continues to expand beyond manufacturing and industrial automation and into the domains of healthcare, field exploration, and cooperative human assistance, robots and machines must become increasingly less rigid and specialized and instead approach the mechanical compliance and versatility of materials and organisms found in nature. As with their natural counterparts, this next generation of robots must be elastically soft and capable of safely interacting with humans or navigating through tightly constrained environments. Just as a mouse or octopus can squeeze through a small hole, a soft robot must be elastically deformable and capable of maneuvering through confined spaces without inducing damaging internal pressures and stress concentrations.
In contrast to conventional machines and robots, soft robots contain little or no rigid material and are instead primarily composed of fluids, gels, soft polymers, and other easily deformable matter. These materials exhibit many of the same elastic and rheological properties of soft biological matter and allow the robot to remain operational even as it is stretched and squeezed. Because of the near absence of rigid materials and its similarities to natural organisms, soft robots may be considered a subdomain of the more general fields of softmatter engineering or biologically inspired engineering. However, whereas these existing fields can be defined by their scientific foundations in soft-matter physics and biology, respectively, the emerging field of soft robotics remains open and free of dogmatic restrictions to any constrained set of methods, principles, or application domains. Instead, soft robotics represents an exciting new paradigm in engineering that challenges us to reexamine the materials and mechanisms that we use to make machines and robots so that they are more versatile, lifelike, and compatible for human interaction.
The promise of soft robots is perhaps best realized in environments and applications that require interaction with soft materials and organisms and/or the artificial replication of biological functionalities. For example, whereas industrial robots typically handle metals, hard plastics, semiconductors, and other rigid materials, medical robots will primarily interact with soft materials such as natural skin, muscle tissue, and delicate internal organs. Likewise, biologically inspired robots for field exploration and disaster relief will often encounter easily deformable surfaces like sand, mud, and soft soil. To prevent the robot from penetrating into the surface and causing damage or mechanical immobilization, the forces transferred between the robot and surface must be evenly distributed over a large contact area. This requires compliance matching—that is, the principle that contacting materials should share similar mechanical rigidity in order to evenly distribute internal load and minimize interfacial stress concentrations.
One measure of material rigidity is the modulus of elasticity, or Young’s modulus—a quantity that scales with the ratio of force to percent elongation of a prismatic bar that is stretched along its principal axis. Young’s modulus is only defined for homogenous, prismatic bars that are subject to axial loading and small deformations (< 0.2% elongation for metals) and thus has limited relevance to soft robots and other soft-matter technologies that have irregular (nonprismatic) shape and undergo large elastic or inelastic deformations. Nonetheless, Young’s modulus is a useful measure for comparing the rigidity of the materials that go into a soft robot. Most conventional robots are composed of materials such as metals and hard plastics that have a modulus of greater than 109 Pa = 109 N/m2. In contrast, most of the materials in natural organisms, such as skin and muscle tissue, have a modulus on the order of 102–106 Pa. That is, the materials in natural organisms are 3–10 orders of magnitude less rigid than the materials in conventional robots. This dramatic mismatch in mechanical compliance is a big reason why rigid robots are often biologically incompatible and even dangerous for intimate human interaction and rarely exhibit the rich multifunctionality and elastic versatility of natural organisms.
There are various materials used to build soft robots. Electroactive polymers (EAP) are often used as artificial muscles. Whole robots are usually made of multiple of these muscle-like actuators. EAPs are a branch of polymers that can contract and bend under applied voltage. They have lot of features that suit them for soft robotics. They can be made in any shape, are elastic, low weight and have large actuation strain. Also, very useful is an ability of EAPs to sense how much stretched they are. This is important when calculating (or ‘sensing’) the shape or the state of a robot’s body.
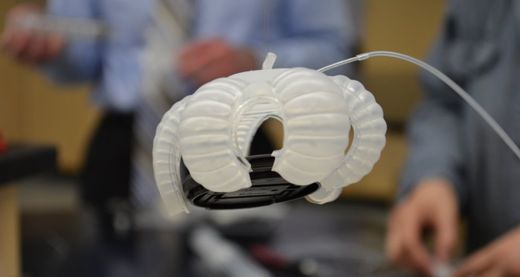
Other kind of soft actuators are the pneumatic artificial muscles (PAMs). These are basically soft tubes with inflexible fiber mesh reinforcement in the wall of the tube or on its surface. When air is pumped in, the tube expands in its diameter and shrinks in longitudinal axis because the fiber cannot stretch. There is also an extensor PAM actuator in which the mesh is placed differently, so the tube extends only in longitudinal axis when pressurized.
controlling soft robots is rather hard. First part of the problem is to determine the actual position and shape of a robot. In case of hard robots it is quite easy to determine its shape, as we know where the DoFs (joints) are. We only need to know the angle of each joint and then calculate the position. Soft robots have infinite number of DoFs, however, there is always a finite number of sensors and actuators (muscles) in their bodies. Therefore it is impossible to have information about the state of each of the DoFs. Possible solution is determining the position of robot’s body parts from outside, using visual information, when the robot would have camera to see the actual situation. Next part of the problem is determining what actions the robot should do to get in the desired positon. To determine the shape of a robot from internal and external forces, multiple physical models have to be employed, namely models for solid and fluid mechanics, kinematics, electro-mechanics, thermodynamics and chemical kinetics. Simulating behavior of a continuum is, however, complicated problem demanding a lot of computational power. Sensing, control and path planning are main problems of today’s soft robotics.
However, as the field of robotics continues to expand beyond manufacturing and industrial automation and into the domains of healthcare, field exploration, and cooperative human assistance, robots and machines must become increasingly less rigid and specialized and instead approach the mechanical compliance and versatility of materials and organisms found in nature. As with their natural counterparts, this next generation of robots must be elastically soft and capable of safely interacting with humans or navigating through tightly constrained environments. Just as a mouse or octopus can squeeze through a small hole, a soft robot must be elastically deformable and capable of maneuvering through confined spaces without inducing damaging internal pressures and stress concentrations.
In contrast to conventional machines and robots, soft robots contain little or no rigid material and are instead primarily composed of fluids, gels, soft polymers, and other easily deformable matter. These materials exhibit many of the same elastic and rheological properties of soft biological matter and allow the robot to remain operational even as it is stretched and squeezed. Because of the near absence of rigid materials and its similarities to natural organisms, soft robots may be considered a subdomain of the more general fields of softmatter engineering or biologically inspired engineering. However, whereas these existing fields can be defined by their scientific foundations in soft-matter physics and biology, respectively, the emerging field of soft robotics remains open and free of dogmatic restrictions to any constrained set of methods, principles, or application domains. Instead, soft robotics represents an exciting new paradigm in engineering that challenges us to reexamine the materials and mechanisms that we use to make machines and robots so that they are more versatile, lifelike, and compatible for human interaction.
The promise of soft robots is perhaps best realized in environments and applications that require interaction with soft materials and organisms and/or the artificial replication of biological functionalities. For example, whereas industrial robots typically handle metals, hard plastics, semiconductors, and other rigid materials, medical robots will primarily interact with soft materials such as natural skin, muscle tissue, and delicate internal organs. Likewise, biologically inspired robots for field exploration and disaster relief will often encounter easily deformable surfaces like sand, mud, and soft soil. To prevent the robot from penetrating into the surface and causing damage or mechanical immobilization, the forces transferred between the robot and surface must be evenly distributed over a large contact area. This requires compliance matching—that is, the principle that contacting materials should share similar mechanical rigidity in order to evenly distribute internal load and minimize interfacial stress concentrations.
One measure of material rigidity is the modulus of elasticity, or Young’s modulus—a quantity that scales with the ratio of force to percent elongation of a prismatic bar that is stretched along its principal axis. Young’s modulus is only defined for homogenous, prismatic bars that are subject to axial loading and small deformations (< 0.2% elongation for metals) and thus has limited relevance to soft robots and other soft-matter technologies that have irregular (nonprismatic) shape and undergo large elastic or inelastic deformations. Nonetheless, Young’s modulus is a useful measure for comparing the rigidity of the materials that go into a soft robot. Most conventional robots are composed of materials such as metals and hard plastics that have a modulus of greater than 109 Pa = 109 N/m2. In contrast, most of the materials in natural organisms, such as skin and muscle tissue, have a modulus on the order of 102–106 Pa. That is, the materials in natural organisms are 3–10 orders of magnitude less rigid than the materials in conventional robots. This dramatic mismatch in mechanical compliance is a big reason why rigid robots are often biologically incompatible and even dangerous for intimate human interaction and rarely exhibit the rich multifunctionality and elastic versatility of natural organisms.
There are various materials used to build soft robots. Electroactive polymers (EAP) are often used as artificial muscles. Whole robots are usually made of multiple of these muscle-like actuators. EAPs are a branch of polymers that can contract and bend under applied voltage. They have lot of features that suit them for soft robotics. They can be made in any shape, are elastic, low weight and have large actuation strain. Also, very useful is an ability of EAPs to sense how much stretched they are. This is important when calculating (or ‘sensing’) the shape or the state of a robot’s body.
Other kind of soft actuators are the pneumatic artificial muscles (PAMs). These are basically soft tubes with inflexible fiber mesh reinforcement in the wall of the tube or on its surface. When air is pumped in, the tube expands in its diameter and shrinks in longitudinal axis because the fiber cannot stretch. There is also an extensor PAM actuator in which the mesh is placed differently, so the tube extends only in longitudinal axis when pressurized.
controlling soft robots is rather hard. First part of the problem is to determine the actual position and shape of a robot. In case of hard robots it is quite easy to determine its shape, as we know where the DoFs (joints) are. We only need to know the angle of each joint and then calculate the position. Soft robots have infinite number of DoFs, however, there is always a finite number of sensors and actuators (muscles) in their bodies. Therefore it is impossible to have information about the state of each of the DoFs. Possible solution is determining the position of robot’s body parts from outside, using visual information, when the robot would have camera to see the actual situation. Next part of the problem is determining what actions the robot should do to get in the desired positon. To determine the shape of a robot from internal and external forces, multiple physical models have to be employed, namely models for solid and fluid mechanics, kinematics, electro-mechanics, thermodynamics and chemical kinetics. Simulating behavior of a continuum is, however, complicated problem demanding a lot of computational power. Sensing, control and path planning are main problems of today’s soft robotics.

 RSS Feed
RSS Feed